





2016 Robot
 2016
2016
College Park District Championship Winner- 2016
College Park Innovation in Control - 2016
Bethesda District Event Winner - 2016
Bethesda Industrial Design - 2016
Haymarket District Event Winner - 2016
Haymarket Innovation in Control
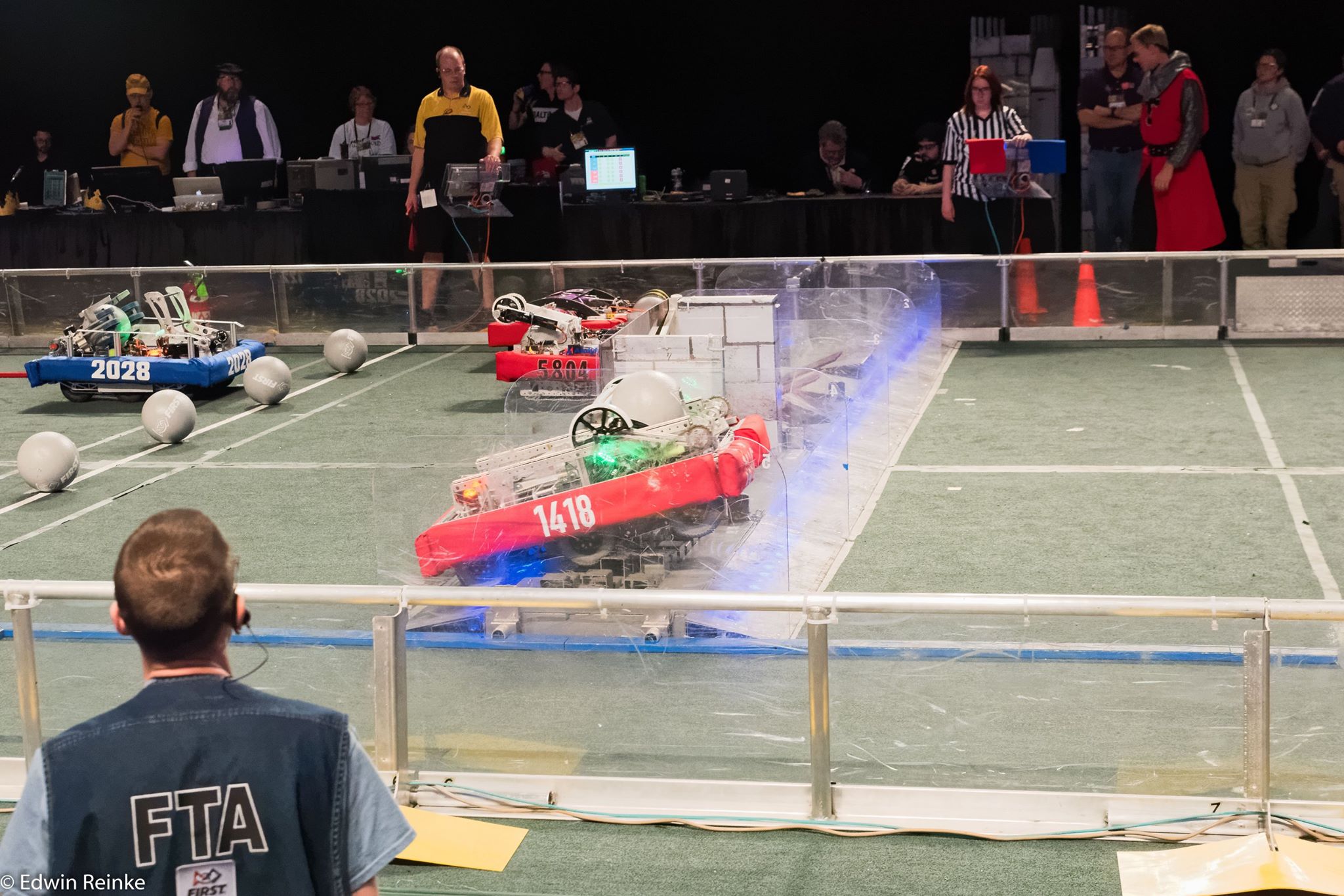
The 2016 FIRST challenge was called FIRST Stronghold. The challenge involved crossing a variable series of defenses, scoring balls into low and high goals, and lifting the robot several feet into the air. For a more detailed description, see the official video reveal.
Team 1418 was recognized as part of the top 1% of teams out of the 3,128 active at the time, as well as the best team in Virginia, Maryland, Delaware, West Virginia, and Washington, DC.
You can view our team’s more detailed results on The Blue Alliance.
Autonomous Modes
- Modular Autonomous: The pride and joy of the programming team, Modular Autonomous, was created for the 2016 competition. Using our touchscreen UI, we could input the robot's position, our allies, and the defenses on the field, and the robot would automatically build a custom autonomous program for any one of the tens of thousands of combinations the field that year could offer. Using Modular autonomous we got up to 15 points from any position, ten for crossing a defense and five for scoring a low goal.
- Low Bar: Low Bar was a simple high-scoring autonomous that quickly went over the low bar and shot. Using Low Bar we were able to get 15 points, ten for crossing a defense and five for scoring a low goal.
- Direct Portcullis: Direct Portcullis got us 10 points by crossing the Portcullis defense using our custom-built arm.
- Direct Cheval: Direct Cheval got us 10 points by crossing the cheval de frise defense using our custom-built arms.
Teleop
This robot was an offensive powerhouse: in one early round, we defeated an alliance of three bots all by ourselves when our alliance partners couldn't join the game. We could breach every defense on our own using our pneumatic tires in order to cross most terrain, our arms to manipulate the more complex defenses, and our small frame to fit anywhere we need to.
We are also able to shoot into the low goal using our arm, scoring extra points and bringing down the tower, working with our team to capture it.
Lastly, we had a scissor lift on the back our robot that allows us to climb the tower, completing one third of the challenge as well as scoring us an extra 15 points at the end of the match.
Robot Abilities
- The Scissor-Lift: Our Scissor lift was this robot's defining feature, giving us the 15 extra climbing points and challenging points to give us the competitive edge in all of the matches. It extended from 9 inches to 5 feet 9 inches, was able to climb in as little as 6 seconds, and its remarkable consistency helped us get as far as we did. The robot was able to accomplish this by using a modified gearbox and a clutch like mechanism. The clutch allowed the weight of the robot to be placed upon the gearbox and string instead of the motors. The particular configuration granted us assurance that the robot would not drift downwards once power was cut.
- Custom-Made Arm: Our custom arm was the most versatile part of the robot, allowing us to breach the portcullis and the cheval defenses, as well as letting us score into the low goal, bringing down tower health.
- 6 8" Pneumatic Wheel Drive Train: Our Pneumatic wheels allowed us to cross every defense with minimal wear-and-tear to our robot, as well as giving us excellent speed, maneuverability, and traction.
- Small Lightweight Frame: Our frame was specially designed to be as small as possible, allowing it to go under the low bar and fit in tight spaces, as well as being light enough for maneuverability and speed. However, our frame's best feature was its sturdiness and durability, resisting wear and tear, and keeping us on the field and out of the pits.
Programming
Just like in previous years, we used Python for our robot code. The code uses “magic robot”, a part of the RobotPy library that makes using objects between classes easy. It is object-oriented, and controls our arm using custom PID control.
In addition to our robot code, team members Erik Boesen and Leon Tan designed a UI for our touchscreen driver station. It is written in JavaScript/HTML/CSS, and communicates with the robot through a python-based tornado server.
Member Erik Boesen then simplified, cleaned up, and rereleased the UI as FRC Dashboard, a more easily-customizable and repurposable version of the UI.
All our code can be found on our GitHub organization. Here are some quick links:
Competition Performance
In the 2016 season, we experienced our best season in the team's history. We were part of the winning and first-seeded alliance in the FIRST Chesapeake Northern Virginia Event at Battlefield High School in Haymarket, VA. Then, we led the first-seeded alliance to victory at the FIRST Chesapeake Greater DC Event at Walt Whitman High School in Bethesda, Maryland. We then led the first-seeded alliance to another stunning victory at the FIRST Chesapeake District Championship sponsored by Booz Allen Hamilton in the University of Maryland’s Xfinity Center in College Park, Maryland. This qualified us for the FIRST World Championship. After a challenging but thrilling fight at worlds, we made it to the division quarterfinals in the 2016 Newton Division, widely believed to have been one of the strongest division of teams in FIRST history.
At the starting of the 2017 season, our 2016 robot was gutted for valuable parts, and its frame was placed on display in the George Mason High School library.
